

Human-Machine Communication
Proliferation of internet-of-things (IoT) will lead to scenarios where humans will interact with and control a variety of networked devices including sensors and actuators. However, interaction with smart objects with minimal effort is still a major challenge.
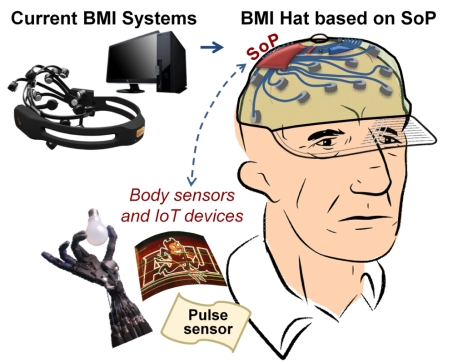 At eLab, we explore modes of communication, machine learning, and mapping techniques for robust human-machine communication. For example, brain-machine interface (BMI) is a promising technology that can provide accessibility to sensors and actuators using limited physical interaction. Wearable brain-machine interfaces can be a key enabler of this interaction for people with disabilities and limited motor skills. At the same time, BMI can improve the quality of life (QoL) of healthy individuals significantly. However, state-of-the-art BMI systems have limited applicability as they are prone to errors even with sophisticated machine learning algorithms used for classifying the electroencephalogram (EEG) signals.
At eLab, we explore modes of communication, machine learning, and mapping techniques for robust human-machine communication. For example, brain-machine interface (BMI) is a promising technology that can provide accessibility to sensors and actuators using limited physical interaction. Wearable brain-machine interfaces can be a key enabler of this interaction for people with disabilities and limited motor skills. At the same time, BMI can improve the quality of life (QoL) of healthy individuals significantly. However, state-of-the-art BMI systems have limited applicability as they are prone to errors even with sophisticated machine learning algorithms used for classifying the electroencephalogram (EEG) signals.
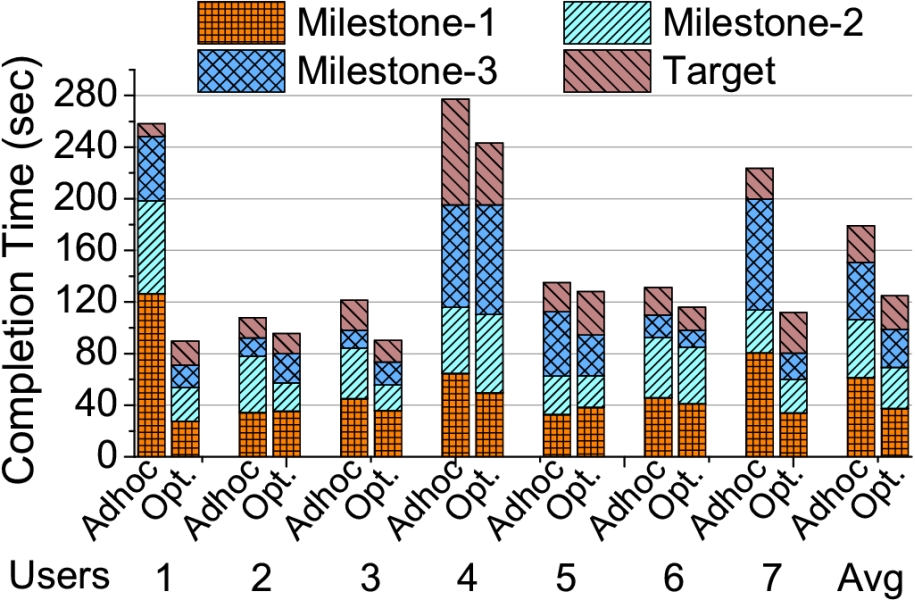 We focus on improving the robustness of human-machine communication using system level methodologies. We have developed an off-line optimal event selection algorithm that identifies the most reliable subset of events supported by the target BMI system. The command confirmation protocol is additional system-level methodology that protects the brain-machine communication against false interpretations at run time. We also developed context-aware human-machine strategies to reduce the false interpretation probability by analyzing the current system state. These strategies significantly reduce the time to drive a wheelchair to its target using only BMI inputs. More details can be found in our recent papers, and the video below [ICCAD-2015][BioCAS 2015].
We focus on improving the robustness of human-machine communication using system level methodologies. We have developed an off-line optimal event selection algorithm that identifies the most reliable subset of events supported by the target BMI system. The command confirmation protocol is additional system-level methodology that protects the brain-machine communication against false interpretations at run time. We also developed context-aware human-machine strategies to reduce the false interpretation probability by analyzing the current system state. These strategies significantly reduce the time to drive a wheelchair to its target using only BMI inputs. More details can be found in our recent papers, and the video below [ICCAD-2015][BioCAS 2015].

